Festo仿生新秀登陆2018工博会
时间:2020-09-06 来源:互联网 阅读次数:
运动跟踪系统,伺服电机维修,用于自控飞行
相机的图像被传输给一个中央主电脑,跟空管控制器一样评估数据和外部协调飞行。电脑上储存了预编程的飞行路径,指定了BionicFlyingFox 执行飞行动作时的路径。借助其自身搭载的电子元件和复杂的飞行模式,人造飞蝠自行计算执行计划运动顺序所需的翅膀运动。飞蝠从主电脑接收必要的控制算法,主电脑对算法自动进行学习,并持续改进。BionicFlyingFox 在飞行时就能优化飞行动作,每飞一圈,对指定飞行路线的遵循性就更精确。
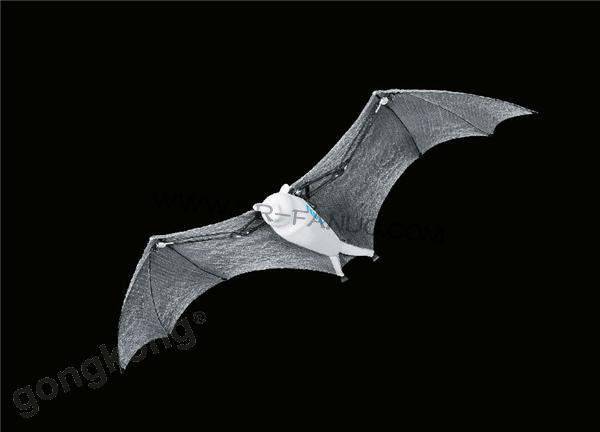
为了研发BionicFlyingFox,Festo仿生学习网络的开发人员仔细研究了狐蝠这种生物,并以技术手段模拟了它独特的飞行模式。这个BionicFlyingFox 是个大家伙,翼展达到2.28 米,通过运动跟踪系统和机器学习,可实现部分自主飞行。为了尽量模拟自然界中狐蝠的飞行,BionicFlyingFox 的翅膀运动机构也被分成主翼和副翼;所有关节处在一个平面上。翅膀覆盖了一层弹性膜,可伸展至脚部。飞行膜非常轻薄,但也很坚韧。
在仿生学习网络项目中,飞行是一个高频话题。大自然中生物的飞行方式各有千秋。要将这些技术投入到科技研发中,需要面临轻量化与功能整合两大挑战。
创新的飞行薄膜是仿生团队专为BionicFlyingFox 开发的,由两片气密膜和一片弹性纤维织物组成,两者焊接在一起,焊点多达约45,000点。织物的蜂窝结构防止飞行膜的细小裂痕继续变大。因此,BionicFlyingFox的织物即使发生了不是很严重的损坏,也能继续飞行。由于材料本身的弹性,翅膀收起时,飞行膜也不会起皱。因为气密膜不仅具有弹性,而且气密、重量轻,伺服电机维修,所以也可用在飞行器中,或用于衣服设计和农业领域。
创新的飞行薄膜,用于各种应用
机器学习,发那科机器人维修,用于最佳飞行路径

为了让BionicFlyingFox 在限定的空间实现半自主的飞行,其与所谓的运动跟踪系统进行通信。该装置的两台红外相机持续记录飞蝠的位置。相机安装在云台上,可旋转和摆动,从地面上监控BionicFlyingFox 的整个飞行过程。同时,机器人维修,运动跟踪系统规划飞行路径,发出所需的控制命令。起飞和着陆需要借助人类操作员;自动飞行系统会在飞行时接管飞行。
10多年前,Festo 发起了仿生学习网络,与学生、知名学府、研究机构和开发公司合作,旨在从仿生学中获取创新灵感,伺服电机维修,将仿生学成果转化为工业自动化技术。
TAG:
- 鱿鱼机器人靠喷水前进,北航与瑞士联邦理工研发仿生机器人(2020-09-17)
- 仿生机器人为何很受欢迎?宅男宅女:与真人很像并且功能实用(2020-06-15)
- 仿生无人机:“破茧成蝶”舞翩跹(2020-06-12)
- Festo与华为共同探索研究5G云化机器人(2019-12-03)
- 拉德国总理站台,把仿生机器人玩上天,解密这家公司的黑科技(2019-12-10)
- 仿生工位:采用人工智能的人机协作(2019-09-14)


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7