韩国NAVER公司正在研究开发变形机器人
时间:2020-08-21 来源:互联网 阅读次数:
MIT的Cheetah机器人是4足步行机器人,重9kg,可以每秒2.45的速度奔跑,与现有的机器人不同,可以前后移动,即使跌倒也可以自己站起来。NAVER开发的变形机器人比这个要更进一步,一般的行走机器人形象是无法变形的,转换需要大量的时间,各种环境下也存在着难以行驶的局限,NAVER LAB克服了这些障碍,机器人电路板维修,机器人示教盒维修,机器人关节像真人关节一样可灵活角度移动。例如,在平地上可驱动轮子行驶,在楼梯或者野外山地上可以直接变成4足步行或者2足步行的方式,根据环境情况变换形态。NAVER LAB把移动机器人与搬运技术结合在一起。
另外,NAVER LAB还在开发能够在阶梯或山地等险地上自由移动的移动机器人等适用于工业领域的机器人技术。据悉,虽然尚不清楚该技术是否会上市,但是长期的相关专利研究持续进行中。NAVER公司的相关人士表示”NAVER LAB 正在研究日常生活中为人提供帮助的多样性的机器人,变形机器人是其中之一,机器人示教器维修,技术平台开发和先行研究并行”。
韩国NAVER公司于今年年初美国拉斯维加斯举办的“CES2019”上公开展示的5G 通信“Amibidex机械手臂”得到了广泛的关注。据业界透露,NAVER公司正在进行超越现有机器人工学界限的研究开发课题。NAVER公司中长期未来规划中,机器人技术占据了不少的比重。
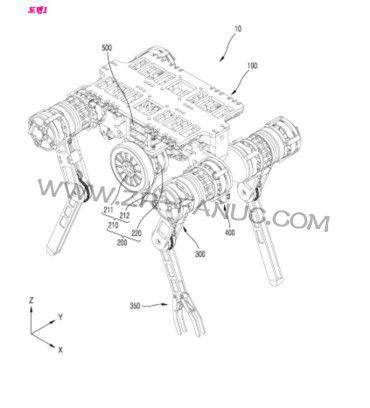
Naver研究开发课题中根据地形变化移动时需要改变形态的变形机器人引人关注。该项目由NAVER LAB负责人石尚宇(音译)亲自指挥,该项目与他之前在麻省理工大学开发的Cheetah机器人形态相似。
,FANUC机器人维修,子锐机器人维修TAG:
- 韩国无人机系统企业――NES&TEC 用独立算法和技术保证轻量化和可(2024-11-28)
- 国内公司研发现实版擎天柱 全自动变形一气呵成(2020-10-15)
- 制造“机器人拣货员”的公司要上市了(2020-10-15)
- 韩华・斗山・现代“协作机器人”韩国市场竞争现状(2020-10-15)
- 韩国文在寅总统视察大邱机器人产业基地并发表机器人产业发展战略报告(2020-10-13)
- 韩国斗山・韩华公司加快协作机器人的事业发展(2020-10-12)


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7