超越视觉系统!科学机器人又一封面!这个新材料为机器人带来人情味!
时间:2020-06-28 来源:互联网 阅读次数:
目前,自主机器人主要使用放置在末端执行器上的视觉和触觉检测器进行外部感知和关节处的传感器以及用于本体感觉的质心以完成复杂的任务。如在动物的神经回路中那样,机器人电路板维修,更分散的传感器网络将允许机器人以更高的触觉分辨率相互作用并且测量随时间累积的机械损伤(即,弯曲或断裂的肢体)。分布式体积传感的重要性在软机器人领域更为明显,子锐机器人维修,其中机器的每个部分都会变形。在这些机器人,分布在整个身体的伸缩传感器最近才用于反馈控制。
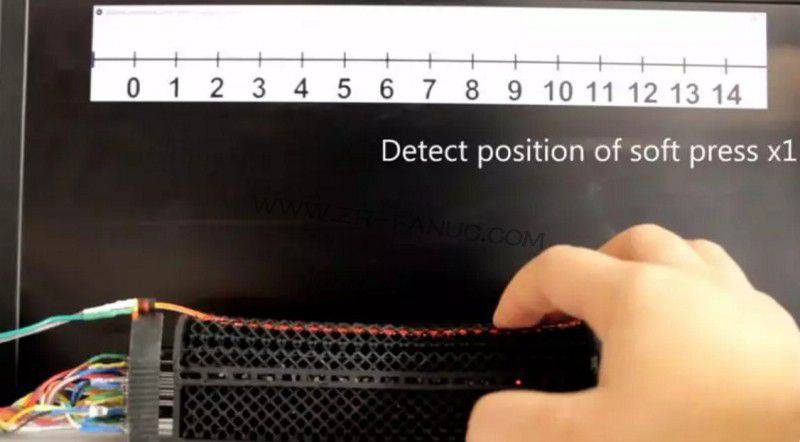
展示了可以准确检测出被按压位置的外部感受“钢琴”。
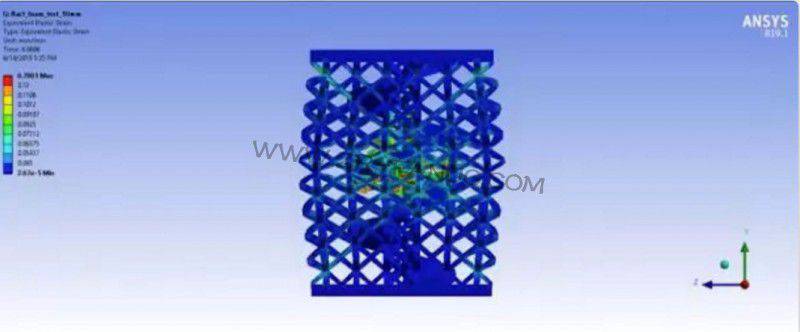
本体感受泡沫圆筒。
在这里,分布在3d打印弹性体框架中的可拉伸光纤的连接创造了一个协整体、传感和通信网络。这种软的、功能性的结构能够以亚毫米级的定位精度(误差为0.71毫米)和亚牛顿级的力分辨率(约0.3牛顿)定位变形。
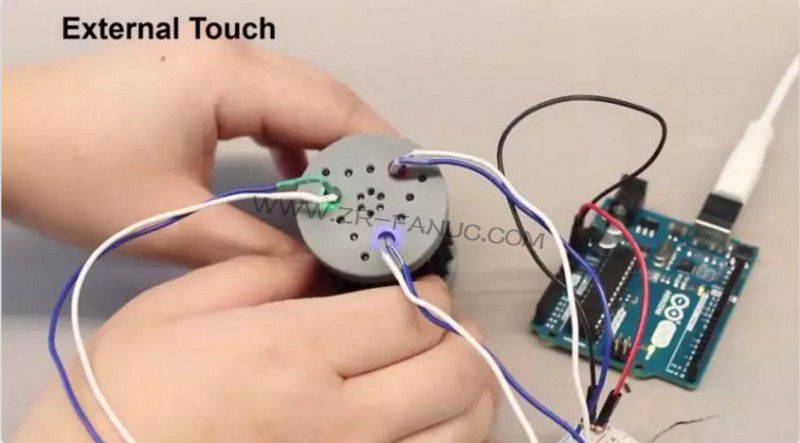
展示泡沫圆筒上的外部感知,可以检测到它被触摸的位置。

一种新的合成材料可以创建一个类似于生物神经系统的相关感官网络,可以使软机器人感知它们如何与环境相互作用并相应地调整它们的行为。在功能上模仿传入感觉神经网络的能力,这是全身分布式传感和通信网络所必需的,现在仍然缺乏。这种限制部分是由于机器人体内的机械传感器缺乏协整性。
许多生物系统已经适应通过发展缠绕的脑 - 身体关系在功能上与外部环境相互作用。这种复杂的安排允许后者感知世界,前者以闭环方式解释它。随着机器人在物理上越来越复杂,认知越来越先进,我们可以从动物神经系统中获取灵感,为控制机器人文物创造必要的基础。
图片来源:Xu等,Scirobotics,4,eaaw6304(2019)图片来源:Xu等,Scirobotics,4,工业机器人维修,eaaw6304(2019)
虽然视觉在机器人的感知中占主导地位,但视觉受限的动物却能使用其他感知形式(如触觉)巧妙地导航环境,科学家已经努力将具有触觉感知的人造皮肤应用于机器人,以获得类似复杂的移动和操作技能。
展示了本体感受泡沫圆筒,可以测量自身压缩水平。
虽然光学花边的灵敏度不如人类指尖那么敏感,但是人体指尖充满了神经感受器,但是这种材料对人体的背部更敏感。这种材料也是可以清洗的,这导致了另一种应用:Shepherd的实验室已经成立了一家初创公司,将Xu的传感器商业化,制作出可以测量人体形状和运动的服装,用于增强现实训练。
图片来源:Xu等,Scirobotics,4,机器人示教器维修,eaaw6304(2019)
通过视觉,听觉,嗅觉,味觉,触觉,甚至磁场和电场的解释,动物和植物都能感受到外在的感觉。本体感觉,自身身体部位的位置和状态的知识,也是通过这些感觉器官的某些组合来实现的; 特别是动物使用通过皮肤下的机械感受器感受到的振动和力,并通过肌肉和腱。根据这些信息,他们执行复杂的任务,例如在失明时操纵或在受伤时改变他们的行为。
Shepherd的实验室以前创造了使用光纤检测这种变形的感官泡沫。对于光学花边项目,Xu使用由3-D印刷聚氨酯制成的柔性多孔网格结构。她用含有十几个机械传感器的可拉伸光纤穿过其核心,然后连接LED灯照亮光纤。
“我们希望有一种方法来测量高度可变形物体的应力和应变,我们希望使用硬件本身,而不是视觉,”实验室主任Rob Shepherd说,机械和航空航天工程副教授和论文的高级作者。“从生物学角度考虑这个问题的一个好方法。一个盲人仍然可以感觉到,因为他们的手指传感器会在手指变形时变形,机器人现在没有这种感觉。”
“当结构变形时,输入线和输出线之间会有接触,并且光线会跳入结构中的这些输出回路,这样你就可以知道接触发生的位置,”徐说。“这种强度决定了变形本身的强度。”
图片来源:Xu等,Scirobotics,4,eaaw6304(2019)
当她在各个点按下晶格结构时,传感器能够精确定位光子流的变化。
Shepherd说,光学花边不会被用作机器人的皮肤涂层,但更像是肉体本身。装有这种材料的机器人将更适合医疗保健行业,工业机器人维修,特别是寿命终止和临终关怀以及制造业。


TAG:
上一篇:虚拟人像咨询机器人海淀上岗
- 深化人工智能研发应用构建驱动百亿智能设备的物联网生态系统(2020-10-18)
- 韩国无人机系统企业――NES&TEC 用独立算法和技术保证轻量化和可信度(2020-05-21)
- NASA联合11家企业开发登月系统 拟2028年具备“可持续”载人月球探测(2020-05-19)
- 江苏北人董事长:工业机器人系统集成技术含量同样很高(2020-05-13)
- 极飞科技发布全新农业无人机系统(2020-05-12)
- 石家庄驾校现机器人“教练” 智能系统指导(2020-10-09)


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7