发那科机器人维修报警SRVO-348异常处理方法
时间:2024-11-19 来源:互联网 阅读次数:
针对发那科机器人示教器上出现的“SRVO-348 DCS MCC关闭报警0,1”这一特定报警,故障现象表现为机器人无法启动,触摸屏上显示机器人异常报警,且故障无法被复位重置。通过深入调查,维修人员发现故障根源在于机器人发出了接触器关闭指令,但接触器并未如期关……
在处理发那科机器人所出现的报警状况时,一般会遵循一系列细致且有条理的步骤来解决问题:
· 报警代码的精准识别:首要任务在于准确解读机器人显示屏上闪烁的报警代码,这一步如同侦探解开谜题的第一把钥匙,是后续判断故障根源及制定维修策略的重中之重。维修人员需具备敏锐的洞察力,迅速锁定报警代码,为后续行动奠定基础。

· 深入系统的故障诊断:一旦报警代码被准确捕捉,将依据代码信息,开展全面而系统的故障诊断。这一环节可能涵盖对机器人机械构造的细致检查、电气连接的稳固性验证、传感器的灵敏度测试以及控制系统的逻辑校验,确保每一个细节都不被遗漏。
· 严格遵循安全操作规范:在着手进行任何实质性的发那科机器人维修操作之前,安全始终被放在首位。必须确保机器人已完全断电,并采取一系列周密的安全防护措施,包括但不限于穿戴防护装备、设置警示标志等,以确保维修过程万无一失。
· 部件的维修或更换:经过详尽的诊断分析,若确定某部件(如电机、编码器或电子模块)为故障源头,维修人员将立即着手进行修复或更换工作。他们凭借丰富的经验和精湛的技术,确保替换或修复的部件能够完美融入系统,恢复机器人的正常运转。
· 重新校准与全面测试:部件更换或发那科机器人维修完成后,机器人需经过严格的重新校准程序,以确保其各项参数回归标准状态。还将进行一系列功能测试,以验证故障是否已被彻底根除,机器人能否重新投入高效稳定的生产作业中。
针对发那科机器人示教器上出现的“SRVO-348 DCS MCC关闭报警0,1”这一特定报警,故障现象表现为机器人无法启动,触摸屏上显示机器人异常报警,且故障无法被复位重置。通过深入调查,维修人员发现故障根源在于机器人发出了接触器关闭指令,但接触器并未如期关闭。
导致这一故障的因素可能包括:
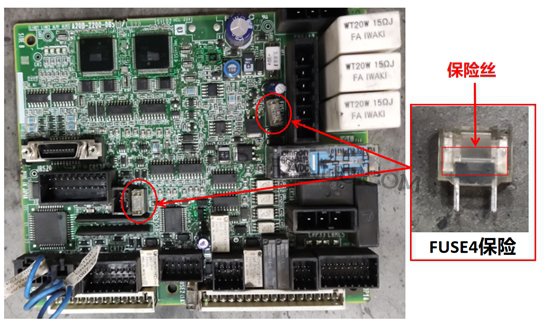
- 急停板上的FUSE4保险丝因承受过大电流而烧毁;
- 连接到急停单元的CRMA74信号线路存在问题,需检查连接目的地是否存在故障;
- 机器人控制器内部的急停单元遭受损坏,无法正常工作;
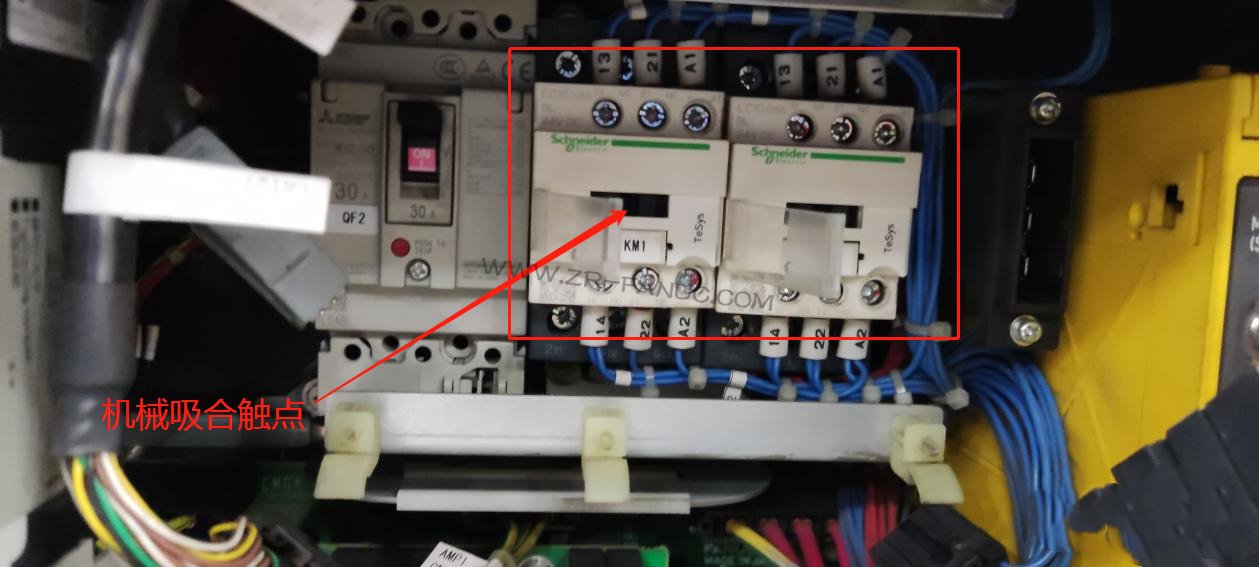
- 急停单元接触器因损坏、未达到额定电压、异物卡阻等原因导致动作不畅,无法顺利吸合。
针对上述可能的故障因素,将采取以下发那科机器人维修措施:
- 关闭控制器电源,仔细检查急停板上的FUSE4保险丝是否熔断(如图),如有损坏则立即更换;
- 对于连接到急停单元的CRMA74信号线路,进行详尽的检测,确保连接目的地无异常;
- 观察急停板外观,即便表面无明显烧焦或发黑迹象,也不能排除内部损坏的可能性,如有必要则更换全新的机器人控制器急停板;
- 关闭控制器电源后,使用电笔检测接触器触点是否带电,并多次尝试操作接触器,观察其机械吸合过程是否存在卡顿或卡死现象。同时,检查线路连接是否牢固,使用万用表检测线圈是否完好无损。
在处理发那科机器人维修报警问题时,维修人员应始终保持对最新维修手册和技术指南的高度关注,确保所采用的维修流程和操作方法均符合最佳实践标准,从而有效提升维修效率和质量。
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
相关资讯
- 发那科机器人伺服电机过流故障维修(2025-03-05)
- FANUC机器人维修A16B-3006-0610驱动器过流(2025-03-04)
- FANUC发那科协作机器人伺服电机过载维修(2025-03-01)
- 发那科R-2000iC/210F机器人维修J3轴减速机抖动(2025-02-28)
- 发那科机器人维修:SRVO-062报警消除(2025-02-27)
- 发那科M-900iB/700机器人维修控制系统故障(2025-02-26)


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7