发那科码垛机器人维修故障现象检查
时间:2024-11-05 来源:互联网 阅读次数:
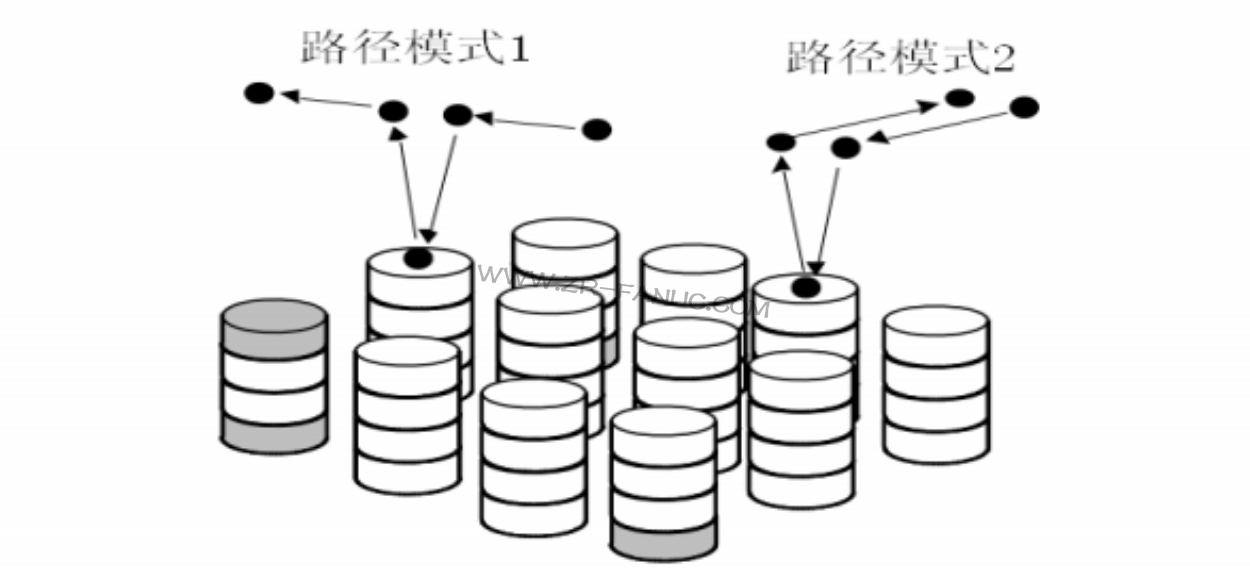
对几个具有显著代表性的点位进行精确的示教操作后,发那科码垛机械手便能实现从下层至上层的有序堆叠工件过程。这一功能不仅展现了其高效性,更确保了堆叠的准确性和稳定性。……
对几个具有显著代表性的点位进行精确的示教操作后,发那科码垛机械手便能实现从下层至上层的有序堆叠工件过程。这一功能不仅展现了其高效性,更确保了堆叠的准确性和稳定性。
关于码垛的种类,可以详细划分为以下两种:
码垛 B:这一类别包括码垛 B(单路径模式)和码垛 BX(多路径模式)。它们特别适用于那些工件姿势保持恒定,且堆叠时底面形状为直线或四角形的场景。这种码垛方式能够确保堆叠的整齐划一,提高生产效率。
码垛 E:这一类别则包括码垛 E(单路径模式)和码垛 EX(多路径模式)。它们更适用于那些需要复杂堆叠模式的场景,如工件姿势发生变化,或堆叠时底面形状非四角形的情况。这种码垛方式能够灵活应对各种复杂的堆叠需求,确保生产过程的顺利进行。
 接下来,深入了解一下FANUC码垛机器人的指令系统:
接下来,深入了解一下FANUC码垛机器人的指令系统:
· 码垛指令格式:
FANUC机械臂的码垛指令是基于码垛寄存器的值来进行计算的。会根据堆叠模式来确定当前的堆叠点位置,并根据路径模式来计算当前的路径。会改写码垛动作指令的位置数据,以确保机械臂能够准确地执行码垛任务。
· 码垛动作指令:
这是一种专用的动作指令,使用具有趋近点、堆叠点、回退点的路径点作为位置数据。这些位置数据在每次码垛过程中都会被码垛指令改写,以确保机械臂能够按照预定的路径和位置进行码垛。
· 码垛结束指令:
当一次码垛任务完成后,系统会计算下一个堆叠点的位置,并改写码垛寄存器的值,为下一次码垛任务做好准备。
在法兰克机器人的使用过程中,我们可能会遇到一些故障。以下是一些常见的故障及诊断方法:
· 无法启动:此时,检查法那科机械臂电源和线路是否正常连接,电池是否电量充足,以及控制面板是否显示正常。这些检查可以快速定位并解决问题。
· 运行不稳定:这可能是由于驱动器故障或机器人各部件连接不牢固引起的。需要对驱动器状态及机器人各部件的连接情况进行仔细检查,以确保机器人的稳定运行。
· 电机拆装不规范:如果电机拆装过程中操作不规范,可能会导致FANUC码垛机械手电机轴受损或影响电机性能。需要规范电机的安装操作,避免敲击电机轴等不当行为。
 · 电机轴运行中受到强烈冲撞:这可能是由于越位撞到机械限位引起的,严重时可能导致法兰克码垛机械手电机损坏。为了避免这种情况的发生,要将限位行程保护开关的常闭触点信号串入到伺服控制器的相关端子上。当限位行程保护开关动作时,电机就会停止运行,从而保护电机免受损坏。
· 电机轴运行中受到强烈冲撞:这可能是由于越位撞到机械限位引起的,严重时可能导致法兰克码垛机械手电机损坏。为了避免这种情况的发生,要将限位行程保护开关的常闭触点信号串入到伺服控制器的相关端子上。当限位行程保护开关动作时,电机就会停止运行,从而保护电机免受损坏。
· 过热:如果机器人出现过热现象,可能是由于散热系统故障或负载过大引起的。检查散热系统是否正常工作,并适当降低负载以减轻发那科码垛机器人的负担。
当法兰克码垛机器人出现故障时,我们可以按照以下步骤进行维修:
· 故障现象检查:对FANUC机器人故障现象进行仔细观察和记录,了解故障的具体表现和情况。
· 故障原因判断:结合机器人的使用环境和历史数据,可以对故障原因进行初步判断。
· 维修工具准备:根据法兰克机械手故障原因,需要准备相应的维修工具和材料,如螺丝刀、扳手、万用表等。这些工具将帮助更高效地完成维修任务。
· 功能测试:发那科机器人维修完成后,需要对机器人进行功能测试以验证维修效果。这包括测试机器人的各项功能是否正常以及是否能够正常工作。只有通过全面的功能测试,才能确保机器人已经恢复正常并可以投入使用。
关于码垛的种类,可以详细划分为以下两种:
码垛 B:这一类别包括码垛 B(单路径模式)和码垛 BX(多路径模式)。它们特别适用于那些工件姿势保持恒定,且堆叠时底面形状为直线或四角形的场景。这种码垛方式能够确保堆叠的整齐划一,提高生产效率。
码垛 E:这一类别则包括码垛 E(单路径模式)和码垛 EX(多路径模式)。它们更适用于那些需要复杂堆叠模式的场景,如工件姿势发生变化,或堆叠时底面形状非四角形的情况。这种码垛方式能够灵活应对各种复杂的堆叠需求,确保生产过程的顺利进行。
· 码垛指令格式:
FANUC机械臂的码垛指令是基于码垛寄存器的值来进行计算的。会根据堆叠模式来确定当前的堆叠点位置,并根据路径模式来计算当前的路径。会改写码垛动作指令的位置数据,以确保机械臂能够准确地执行码垛任务。
· 码垛动作指令:
这是一种专用的动作指令,使用具有趋近点、堆叠点、回退点的路径点作为位置数据。这些位置数据在每次码垛过程中都会被码垛指令改写,以确保机械臂能够按照预定的路径和位置进行码垛。
· 码垛结束指令:
当一次码垛任务完成后,系统会计算下一个堆叠点的位置,并改写码垛寄存器的值,为下一次码垛任务做好准备。
在法兰克机器人的使用过程中,我们可能会遇到一些故障。以下是一些常见的故障及诊断方法:
· 无法启动:此时,检查法那科机械臂电源和线路是否正常连接,电池是否电量充足,以及控制面板是否显示正常。这些检查可以快速定位并解决问题。
· 运行不稳定:这可能是由于驱动器故障或机器人各部件连接不牢固引起的。需要对驱动器状态及机器人各部件的连接情况进行仔细检查,以确保机器人的稳定运行。
· 电机拆装不规范:如果电机拆装过程中操作不规范,可能会导致FANUC码垛机械手电机轴受损或影响电机性能。需要规范电机的安装操作,避免敲击电机轴等不当行为。
· 过热:如果机器人出现过热现象,可能是由于散热系统故障或负载过大引起的。检查散热系统是否正常工作,并适当降低负载以减轻发那科码垛机器人的负担。
当法兰克码垛机器人出现故障时,我们可以按照以下步骤进行维修:
· 故障现象检查:对FANUC机器人故障现象进行仔细观察和记录,了解故障的具体表现和情况。
· 故障原因判断:结合机器人的使用环境和历史数据,可以对故障原因进行初步判断。
· 维修工具准备:根据法兰克机械手故障原因,需要准备相应的维修工具和材料,如螺丝刀、扳手、万用表等。这些工具将帮助更高效地完成维修任务。
· 功能测试:发那科机器人维修完成后,需要对机器人进行功能测试以验证维修效果。这包括测试机器人的各项功能是否正常以及是否能够正常工作。只有通过全面的功能测试,才能确保机器人已经恢复正常并可以投入使用。
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
上一篇:发那科机器人平衡缸维修具体细节
下一篇:发那科焊接机器人维修
相关资讯
- 发那科机器人伺服电机过流故障维修(2025-03-05)
- FANUC机器人维修A16B-3006-0610驱动器过流(2025-03-04)
- FANUC发那科协作机器人伺服电机过载维修(2025-03-01)
- 发那科R-2000iC/210F机器人维修J3轴减速机抖动(2025-02-28)
- 发那科机器人维修:SRVO-062报警消除(2025-02-27)
- 法那科M-2000iA/1200机器人维修讲解(2025-02-24)


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7