ICC技术在冰淇淋装箱系统中的应用
时间:2019-12-06 来源:互联网 阅读次数:
? 输送链上的隔挡宽度可以在设计范围内实现无极可调,兼容性强。
单台IRB 360机器人可同时对应2条步进隔挡线,占地空间小,有效帮助客户节约了场地;
ICC技术在冰淇淋装箱系统中的应用
ABB步进输送线跟踪(ICC)提供的功能能够让机器人跟踪移动传送带上的工件。步进输送线具有很多尺寸相等的隔挡,被操作的工件放置在这些隔挡内。要接收这种隔挡中的工件,需要暂时停止输送线,以获得工件,然后再快速移动输送线,以接收下一个隔挡中的新工件。这种在特定距离里的快速停止和移动称为步进。当步进输送线在运转中时,机器人将跟踪传输送线上的工件,另外,即使步进输送线速度在运转期间发生变化,但相对于工件的位置也将保持不变。
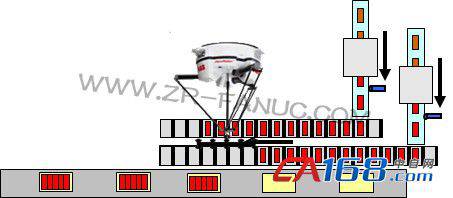
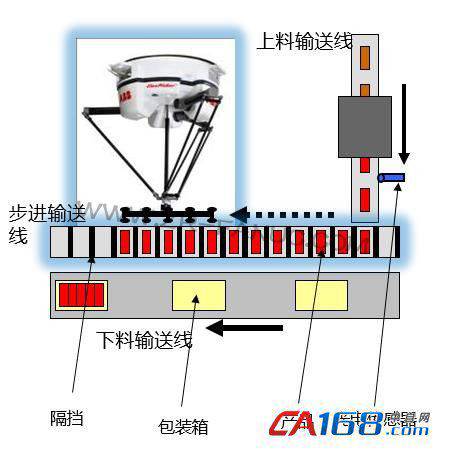
机器人双线冰淇淋装箱系统布局示意图
步进式产品输送线? 可以独立工作,也可以与PickMaster 3共同工作。
型号: IRB 360-8/1130
产品加速输送线
噪声等级: <70dB
ABB的ICC技术适用于标准外形物料需要经过按一定数量整理后批量处理的应用。一般情况下,在“箱装”应用中,上料输送线将以高速率频率把对象放到步进输送线上。之后,机器人示教器维修,机器人将拾取步进输送线上的对象,然后将其放到下料输送线上。 ? 可以规定最大跟踪距离。
最大臂展直径: 1.13 m
机器人技术参数
? 夹具技术先进,由于步进式产品输送线上产品间距与装箱后的产品间距不同,机器人抓取和放置产品时,夹具上巧用机器人第4轴作为伸缩动力,机器人主板维修,实现夹具轻量化,同时提高了夹具的稳定性。
单台机器人产能高达400支/分钟;
电源: 3 相 400V(+10%,-15%), 50Hz
?节约投资成本
ABB步进输送线跟踪(ICC)提供高效快速的食品装箱包装解决方案,以下列举蒙牛冰淇淋项目中一个具体案例,1套ABB机器人双线冰淇淋装箱系统,包含1台IRB 360-8/1130型工业机器人和配套机器人夹具、机器人支架、步进式产品输送线ICC、产品加速输送线。
夹具
? 当新来对象通过数字信号输入时,使步进输送线同步。
ABB对该应用中所有的相关技术具有完整的、独一无二的专利版权。 ? 位于步进式产品输送线前端,将冰淇淋高速传送给步进式产品输送线。
? 可以“即时”激活输送线跟踪,即必在精点停止。
安装方式: 倒挂安装
?技术先进
? 通过机器人与伺服系统之间的通信,保证机器人与输送线的同步运动,实现机器人对产品的跟踪抓取。
相对湿度: 95%
位置重复精度: 0.07 mm
? 最多可把100个对象组织到一个对象队列,并且该队列可由RAPID指令进行操纵
? 兼容性强,同一套夹具可适应几十种不同规格的产品。 装箱单元优势:
? 线性传送带
应用案例
?结构紧凑、集成度高
环境温度: 5℃- 45℃
功能
拥有可调柔性输送链步进式设计,输送链上的隔挡宽度可实现无极可调,兼容性强,适应多种产品的装箱需求;夹具的开合由机器人第四轴自动控制, 实现夹具轻量化,同时提高了夹具的稳定性;
轴数: 4
额定功率: 4 KVA
? 步进输送线由机器人系统控制,即不需要编码板。
? 能够定义跟踪开始之前,某对象必须所处的启动窗口。
? 采用加速输送线,伺服电机维修,将前段输送线上的产品间距加大,方便产品依次进入步进输送线。
? 抓取方式为一抓一放,一次装一箱或两箱(对应夹具不同)。
手腕持重: 8 kg
? 夹具由机械部件、真空系统等组成。
?专利版权
防护等级: IP54
通常要实现同样功能,1条步进输送链需要安装2台伺服电机驱动2组隔挡,通过间歇运转在输送链末端定位置静态抓取;
? 夹具每次吸取5个或10个产品。
ICC技术最突出的优势是高速精准跟踪,能够让机器人以高精度跟踪高速的步进式产品输送线。输送线是作为ABB机器人的一个外轴来驱动的,使用的是ABB伺服电机驱动,由机器人系统统一控制,这样就保证了机器人和步进线的高速精确同步,FANUC机器人维修,同一控制器精确控制,不需要编码器和编码器板。即使机器人和产品均处于高速运动,也能做到精准跟踪。机器人跟踪步进线的线性加速度可以达到12000mm/s2。
? 输送线采用ABB伺服马达驱动,工业机器人维修,有效控制输送线速度及每次运动距离,对产品进行步进式供给。
TAG:
- 发那科CRX协作机器人大展身手,技术推动场景突破(2024-07-19)
- “智造专家,埃夫特”牵手安徽机电职业技术学院,开启校企合作新篇章(2020-10-21)
- 韩国无人机系统企业――NES&TEC 用独立算法和技术保证轻量化和可(2024-11-28)
- 海尚矢量摆线减速机最新技术首发,开创性双摆线差动变速(2020-10-17)
- 度小满机器人“声援”KI上校:同为AI技术担当,我挺你!(2025-01-07)
- CES2019前瞻:八大技术或将颠覆安防行业(2020-05-15)


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7